




Lära siglaserjusteringstekniker
Att säkerställa laserstrålens inriktning är den primära uppgiften i inriktningsprocessen. Detta kan kräva användning av ytterligare optik såsom linser eller fiberkollimatorer, särskilt för diod- ellerfiberlaserkällorInnan laserjustering måste du vara bekant med lasersäkerhetsprocedurer och se till att du är utrustad med skyddsglasögon som är lämpliga för att blockera laservåglängder. Dessutom kan detektionskort behövas för osynliga lasrar för att underlätta justeringen.
Ilaserjustering, strålens vinkel och position måste styras samtidigt. Detta kan kräva användning av flera optiska element, öka komplexiteten i justeringsinställningarna och kan ta upp mycket skrivbordsutrymme. Men med kinematiska fästen kan en enkel och effektiv lösning användas, särskilt för utrymmesbegränsade tillämpningar.
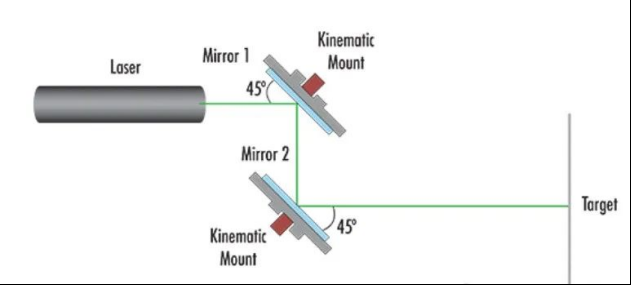
Figur 1: Parallell (Z-vik) struktur
Figur 1 visar den grundläggande uppställningen av Z-vikningsstrukturen och orsaken till namnet. De två speglarna monterade på två kinematiska fästen används för vinkelförskjutning och är placerade så att den infallande ljusstrålen träffar spegelytan på varje spegel i samma vinkel. För att förenkla uppställningen, placera de två speglarna i cirka 45°. I denna uppställning används det första kinematiska stödet för att erhålla önskad vertikal och horisontell position för strålen, medan det andra stödet används för att kompensera för vinkeln. Z-vikningsstrukturen är den föredragna metoden för att rikta flera laserstrålar mot samma mål. När man kombinerar lasrar med olika våglängder kan en eller flera speglar behöva bytas ut mot dikroiska filter.
För att minimera dubbelarbete i uppriktningsprocessen kan lasern riktas in vid två separata referenspunkter. Ett enkelt hårkors eller ett vitt kort markerat med ett X är mycket användbara verktyg. Först, placera den första referenspunkten på eller nära ytan av spegel 2, så nära målet som möjligt. Den andra referenspunkten är själva målet. Använd det första kinematiska stativet för att justera strålens horisontella (X) och vertikala (Y) positioner vid den initiala referenspunkten så att den matchar målets önskade position. När denna position har uppnåtts används en andra kinematisk konsol för att justera vinkelförskjutningen, så att laserstrålen riktas mot det faktiska målet. Den första spegeln används för att approximera önskad uppriktning, medan den andra spegeln används för att finjustera uppriktningen av den andra referenspunkten eller målet.
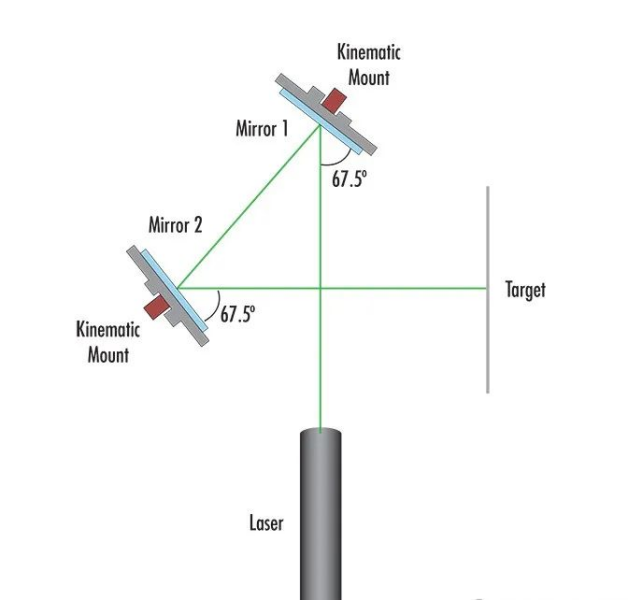
figur 2: Vertikal struktur (figur 4)
Figur-4-strukturen är mer komplex än Z-vikningen, men kan ge en mer kompakt systemlayout. I likhet med Z-vikningen använder figur-4-layouten två speglar monterade på rörliga fästen. Till skillnad från Z-vikningen är spegeln dock monterad i en vinkel på 67,5°, vilket bildar en "4"-form med laserstrålen (figur 2). Denna konfiguration gör att reflektorn 2 kan placeras bort från laserstrålens bana. Precis som med Z-vikningen ärlaserstrålebör vara inriktad vid två referenspunkter, den första referenspunkten vid spegel 2 och den andra vid målet. Den första kinematiska fästet används för att flytta laserpunkten till önskad XY-position på ytan av den andra spegeln. En andra kinematisk fäste bör sedan användas för att kompensera för vinkelförskjutning och finjustera inriktningen på målet.
Oavsett vilken av de två konfigurationerna som används, bör ovanstående procedur minimera antalet iterationer som krävs för att uppnå önskat resultat. Med rätt verktyg och utrustning och några enkla tips kan laserjustering förenklas avsevärt.
Publiceringstid: 11 mars 2024