




LaserAnalys och bearbetning av fjärrsignaler för taldetektering
Avkodning av signalbrus: signalanalys och bearbetning av laserbaserad fjärrdetektering av tal
Inom teknikens förunderliga arena är laserstyrd taldetektering som en vacker symfoni, men denna symfoni har också sitt eget "brus" – signalbrus. Liksom en oväntat högljudd publik på en konsert är buller ofta störande ilasertaldetekteringEnligt källan kan bruset från laserbaserad fjärrdetektering av talsignaler grovt delas in i brus som introduceras av själva laservibrationsmätningsinstrumentet, brus som introduceras av andra ljudkällor nära vibrationsmätningsmålet och brus som genereras av miljöstörningar. Långdistansdetektering av tal behöver i slutändan erhålla talsignaler som kan kännas igen av mänsklig hörsel eller maskiner, och många blandade ljud från den yttre miljön och detekteringssystemet kommer att minska hörbarheten och förståelsen av de insamlade talsignalerna, och frekvensbandsfördelningen av dessa brus sammanfaller delvis med huvudfrekvensbandsfördelningen av talsignalen (cirka 300~3000 Hz). Det kan inte bara filtreras med traditionella filter, och ytterligare bearbetning av detekterade talsignaler behövs. För närvarande studerar forskare främst brusreducering av icke-stationärt bredbandsbrus och stötbrus.
Bredbandsbakgrundsbrus bearbetas generellt med korttidsspektrumestimeringsmetod, delrymdsmetod och andra brusreduceringsalgoritmer baserade på signalbehandling, såväl som traditionella maskininlärningsmetoder, djupinlärningsmetoder och andra talförbättringstekniker för att separera rena talsignaler från bakgrundsbruset.
Impulsbrus är det specklebrus som kan introduceras av den dynamiska speckleeffekten när detektionsmålets plats störs av detektionsljuset från LDV-detekteringssystemet. För närvarande avlägsnas denna typ av brus huvudsakligen genom att detektera platsen där signalen har en hög energitopp och ersätta den med det förutspådda värdet.
Laserfjärrstyrd röstdetektering har tillämpningsmöjligheter inom många områden såsom avlyssning, multimodsövervakning, intrångsdetektering, sök och räddning, lasermikrofon, etc. Det kan förutsägas att den framtida forskningstrenden för laserfjärrstyrd röstdetektering huvudsakligen kommer att baseras på (1) att förbättra systemets mätprestanda, såsom känslighet och signal-brusförhållande, optimera detekteringsläget, komponenterna och strukturen i detekteringssystemet; (2) Förbättra anpassningsförmågan hos signalbehandlingsalgoritmer, så att lasertekniken för röstdetektering kan anpassa sig till olika mätavstånd, miljöförhållanden och vibrationsmätningsmål; (3) Mer rimligt val av vibrationsmätningsmål och högfrekvenskompensation av talsignaler mätta på mål med olika frekvensresponsegenskaper; (4) Förbättra systemstrukturen och ytterligare optimera detekteringssystemet genom
miniatyrisering, portabilitet och intelligent detekteringsprocess.
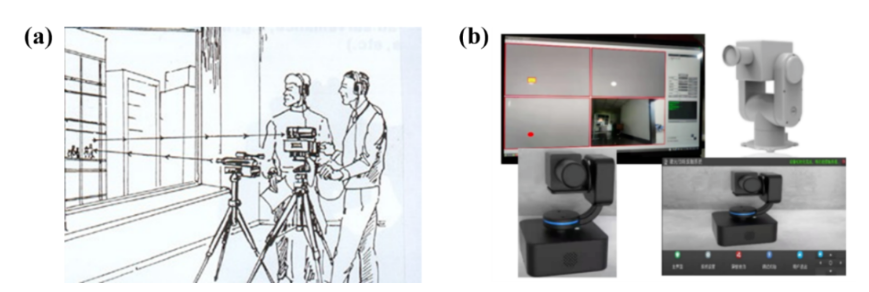
FIG. 1 (a) Schematiskt diagram över laseravlyssning; (b) Schematiskt diagram över laseravlyssningssystemet
Publiceringstid: 14 oktober 2024